
几年前,我参加了一项研究,我必须玩一个越来越难的电脑游戏。令我惊讶的是,负责这项研究的科学家告诉我,我在难度更高的游戏中表现得更好。他说这并不罕见——有些人在比赛更具挑战性时保持专注,但在更容易的试验中感到无聊并失去注意力。
像这样的错误在文献中被称为失误,即您拥有所有信息来做出决定但仍然做出错误选择的情况。失误的描述散布在决策领域,发生在各种物种和情况下。被要求报告明显闪光的人有时会错过它们,即使他们可以检测到更微妙的线索。啮齿动物通常会在 10% 到 20% 的决策试验中犯错误,尽管有时它们的准确率接近 100%。
科学家们对失误提出了许多解释,从缺乏注意力到运动错误,比如不小心按错了按钮。但是现有的理论并不能令人满意地解释各种失误的模式——例如,为什么它们可能会发生在回合中,或者有时会影响更容易或更模糊的试验。超越标准投入产出法的研究决策的新努力为研究失误提供了另一种途径。这些努力跟踪大脑的内部状态以及它如何影响动物使用感觉信号做出决定的方式。
加州大学洛杉矶分校的神经科学家、Simons Collaboration on the Global Brain 的研究员Anne Churchland说:“让决策总是很有趣的是,传入的信号不会以反射的方式运作。”例如,一天早上你可能会在黄灯时刹车,而第二天你可能会踩到油门。 “根据大脑所处的状态,相同的刺激会做不同的事情,而我们才刚刚开始能够描述这些状态。”
 大脑的内部状态会影响我们的行为方式,例如我们是加速还是在黄灯下停止。
大脑的内部状态会影响我们的行为方式,例如我们是加速还是在黄灯下停止。大多数关于决策的研究都假设动物在整个实验过程中都处于相同的状态——使用相同的决策策略。 “认为大脑随着时间的推移处于同一状态是错误的,但这是每个人一直在做的事情,”普林斯顿大学的神经科学家和 SCGB 研究员Ilana Witten说。 Churchland、Witten 等人的新研究表明,这种状态如何随着时间的推移而变化,在不同的策略之间切换,并强调了动物的内部状态对其行为可能产生的深远影响。
搜索隐藏状态
乍一看,雄性果蝇在试图求偶时表现得不可预测。有时它们会主动追逐附近的雌性,而有时它们似乎无视她。在 2019 年发表的研究中,当时的 SCGB 研究员Adam Calhoun 、SCGB 调查员Mala Murthy和Jonathan Pillow对这种可变性进行了更正式的研究。他们发现,从感官线索预测苍蝇求偶行为的能力各不相同,他们假设雄性苍蝇唱歌来吸引雌性,可能会随着时间的推移改变它们的歌唱策略。为了探索这些变化,他们使用隐马尔可夫模型 (HMM) 分析了男性的行为,这有助于在其他嘈杂的数据中找到模式。该研究表明,雄性果蝇可能处于三种不同状态之一——接近雌性但移动缓慢、积极追逐雌性或对雌性不感兴趣。苍蝇如何使用感官信息来指导他的歌声取决于他的状态。 “我们缺乏识别内部状态的工具,但这种方法使我们能够仅从行为的基础上识别状态变化,”普林斯顿大学计算神经科学家 Pillow 说。 (有关更多信息,请参阅“果蝇如何求爱。”)
接受过决策任务训练的小鼠表现出类似有趣的行为模式。有时他们可以高度准确地执行任务。但有时他们会犯错误,这不一定与任务的难度相关。事实上,研究啮齿动物的研究人员指出,这些动物通常会在 10% 到 20% 的试验中失败。国际大脑实验室(IBL) 生成的大量标准化决策数据是 22 个实验室之间的合作,所有实验室都执行相同的任务,这为深入研究这一观察结果提供了机会。 “总体而言,IBL 和鼠标决策的兴起激发了我们以前所未有的方式看待决策,”Pillow 说。 (有关 IBL 的更多信息,请参阅“ 为神经科学研究建立新模型”。)
在 IBL 任务中,老鼠转动一个轮子来指示具有不同对比度的光栅是出现在左边还是右边。在经典的失误模型中,动物要么参与,要么脱离,大多数失误发生在后一种状态。但是在使用 HMM 分析动物的表现时,Pillow、研究生 Zoe Ashwood 和合作者发现,三个状态最好地解释了数据——一个参与状态,动物表现几乎完美,两个脱离状态,动物倾向于坚持无论感官信息如何,左或右选择。这些状态在数十次试验中持续存在,并发生在绝大多数动物身上。 “这篇论文引起了共鸣,因为它提供了一种量化研究人员已经意识到但无法量化的影响的方法,”Pillow 说。
为了确保这些发现不是针对 IBL 任务的,研究人员分析了另外两个数据集。在一项老鼠研究中,动物必须报告他们是否听到了低频或高频声音,该模型确定了四种状态——参与、偏左、偏右和“获胜”,在这些状态下,动物会坚持以前的奖励选择.在一项关于视觉辨别的人类研究中,人们必须决定一组移动的点是否比以前的刺激更连贯,二态和三态模型比经典的失效模型更好地解释了数据。该研究结果于 2 月发表在《自然神经科学》杂志上。
科学家们还不知道是什么触发了状态之间的切换。 HMM 预测动物从一种状态转移到另一种状态的概率,但它们没有捕捉到驱动这种转变的因素。研究人员计划通过应用线性回归模型来探索这个问题,以确定饱腹感、疲劳、最近的奖励和其他变量是否可以帮助预测动物是否会过渡到另一种状态。
电路状态
对不同决策状态的清晰观察引出了一个问题——在这些较量期间大脑中发生了什么? Witten、Pillow 和合作者正在结合使用虚拟现实、神经记录和光遗传学扰动——用光使特定神经元沉默——来探索不同的神经回路如何促成不同的状态。
在三月份发表在《自然神经科学》杂志上的一项研究中,研究人员记录了动物在虚拟迷宫中导航时纹状体的神经活动,并根据视觉线索决定转向哪条路。 “我们已经定性地观察到,老鼠并没有随着时间的推移使用相同的策略,但没有办法量化它,”Witten 说。她的团队还注意到,动物通常不会以相同的方式对光遗传学扰动做出反应——在某些情况下,使一组神经元沉默可能会影响动物的决定,但在其他情况下不会影响动物的决定,或者在某些试验中但不是全部。 “但我们没有办法查看它,”她说。
该团队将相同的 HMM 模型应用于他们的数据,结果令人惊讶。当动物在迷宫中导航时,它们可能处于三种不同状态之一——一种脱离状态,在这种状态下它们倾向于重复先前的选择,或者两种参与状态中的一种,外表看起来相同,但对扰动的反应不同。在一种状态下,部分纹状体中的神经元沉默会影响动物的选择。在另一种情况下,沉默没有效果。 “我们没想到会产生如此巨大的影响,”Witten 说。 “评论者非常怀疑,因为这太令人惊讶了。我们必须做很多控制才能让人们相信它。”
研究结果表明,动物正在使用不同的神经通路来解决任务。 “你可能会想象,当一只动物参与进来时,会涉及到相同的决策回路,但这篇论文表明情况并非如此,”Pillow 说。 “即使动物参与其中,也有一种状态依赖纹状体,另一种状态则不依赖纹状体。”这些不同的策略仅从行为中并不明显。 “我认为这与冗余有关,”威滕说。 “这表明平行的大脑回路可以实现类似的功能。”
与 IBL 研究的情况一样,研究人员还不知道是什么触发了不同策略之间的转变。 Witten 的团队正在探索这样一种想法,即在大脑中具有巨大投射并与内部状态有关的神经调节剂发挥作用。例如,高水平的去甲肾上腺素可能会使大脑进入纹状体依赖状态。为了探索这个问题,研究人员正在测量不同神经调节剂的水平,以查看它们的活动是否能预测状态转换。
另一个主要问题是为什么动物会在表面上具有相同影响的策略之间切换——动物做出相同的选择——但在内部依赖于不同的电路。 “这是一个令人兴奋的方向,”Pillow 说。 “这些州有什么好处?它们对学习很重要吗?它是否有助于动物跟踪环境的不同统计数据或跟踪行为?”研究人员还计划检查下游大脑区域是否显示出类似的差异。 “我不认为状态依赖是纹状体依赖的,”Witten 说。 “我认为这是一种大脑状态的变化。”
Pillow 的团队现在正在与其他人合作,将他们的方法应用于不同类型的数据。他们正在与普林斯顿大学的 SCGB 调查员 Carlos Brody 和 SCGB 主任 David Tank 合作,使大脑的某些部分(例如海马体)失活,以找到对失活易感或有弹性的状态,因此依赖于不同的大脑回路。
Witten 说,研究人员使用的代码是公开可用的,并且可用于大多数数据集。 “我认为,如果人们对他们的数据进行相同的分析,他们会得到类似的现象。”她希望越来越多的人会采用这种方法。 “它解释了这么多。”
陷入探索
虽然有些失误可以用注意力不集中来解释,但其他失误可能反映了一个更积极的过程——例如,大脑探索新策略。在注意到多感官决策研究的趋势后,Churchland 的实验室受到启发来研究这种可能性。当人们和啮齿动物只获得视觉或听觉信息来做出决定时,他们更容易犯错误,而不是两者一起。 “我们对此非常担心,但没有做出解释,”Churchland 说。简单的缺乏关注并不是一个令人满意的解释。 “为什么动物更容易在非感官试验中打瞌睡?”她说。
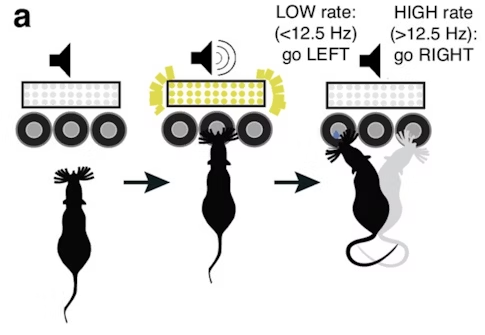 动物必须根据声音或闪光灯的频率或两者一起选择左侧或右侧端口。图片来源:Pisupati 等人。埃莱夫,2021。
动物必须根据声音或闪光灯的频率或两者一起选择左侧或右侧端口。图片来源:Pisupati 等人。埃莱夫,2021。Churchland 的一名学生 Sashank Pisupati 提出了另一种解释——也许失误与不确定性和探索有关。例如,当你在学习一个新游戏时,你可能会尝试不同的策略,也许会做出一个冒险的选择,看看它是否会带来丰厚的回报。 “通常最佳策略是平衡探索和开发,”Churchland 说。 “你不会假设你完全了解这个游戏,所以你会在一些试验中做出探索性的选择来检验这个理论。”虽然这个想法在概率决策世界中很常见,在没有正确或错误选择的保证的情况下,研究感知决策的研究人员通常不会纳入探索的概念。 “我们假设动物知道规则,”丘奇兰说。 “如果他们犯了错误,我们认为这是由于感知上的不确定性。”
探索可能有风险,因此平衡风险和收益的一种策略是在奖励确定时选择奖励选项,但在奖励可能性较低时进行探索。这可以解释为什么当动物同时拥有听觉和视觉信息来支持他们的选择时,它们不太可能失败——探索。 “探索是由信息的不确定性驱动的,”Churchland 说。
在去年发表在eLife上的研究中,Churchland、Pisupati、当时的研究生 Lital Chartarifsky-Lynn 和合作者通过改变左右选择的奖励概率以使动物偏向探索或利用状态来测试这一假设。然后,他们分析了由此产生的失误率。正如他们所预测的那样,当动物对奖励有很高的期望时,他们不太可能失败。 “通过研究多感官整合,我们偶然发现了这种对失误的新解释,我们认为这种解释非常普遍,”Churchland 说。
Churchland 说,这两种方法——HMM 状态模型和不确定性引导探索——并不相互排斥,而是解决了失误的两个不同方面。 “这两件事加在一起会驱使动物和人类犯错,而且可能还有其他解释。”在这两种情况下,动物失败的可能性都反映了一种内部表征——大脑对不确定性的估计或其参与程度——它决定了感官信息的解释方式并指导它的使用方式。 Pillow 和 Churchland 现在正在考虑如何将这两种处理失误的方法结合起来,以探索,例如,是否存在探索和利用的扩展状态,就像他们发现的参与和脱离状态一样。
原文: https://www.simonsfoundation.org/2022/05/26/in-mapping-mistakes-a-window-to-the-inner-mind/